สรุปข่าว
วันที่ 7 สิงหาคมที่ผ่านมา นักวิจัยจากห้องปฏิบัติการปัญญาประดิษฐ์ กูเกิล ดีปมายด์ (Google Deepmind) สหรัฐอเมริกา ร่วมมือกับบริษัท เอบีบี (ABB) ผู้ผลิตแขนหุ่นยนต์ในโรงงานอุตสาหกรรมชั้นนำของโลก พัฒนาแขนหุ่นยนต์รูปแบบพิเศษ ที่สามารถเล่นปิงปองได้อย่างคล่องแคล่ว ในระดับที่สามารถแข่งขันเอาชนะนักปิงปองที่เป็นมนุษย์ได้
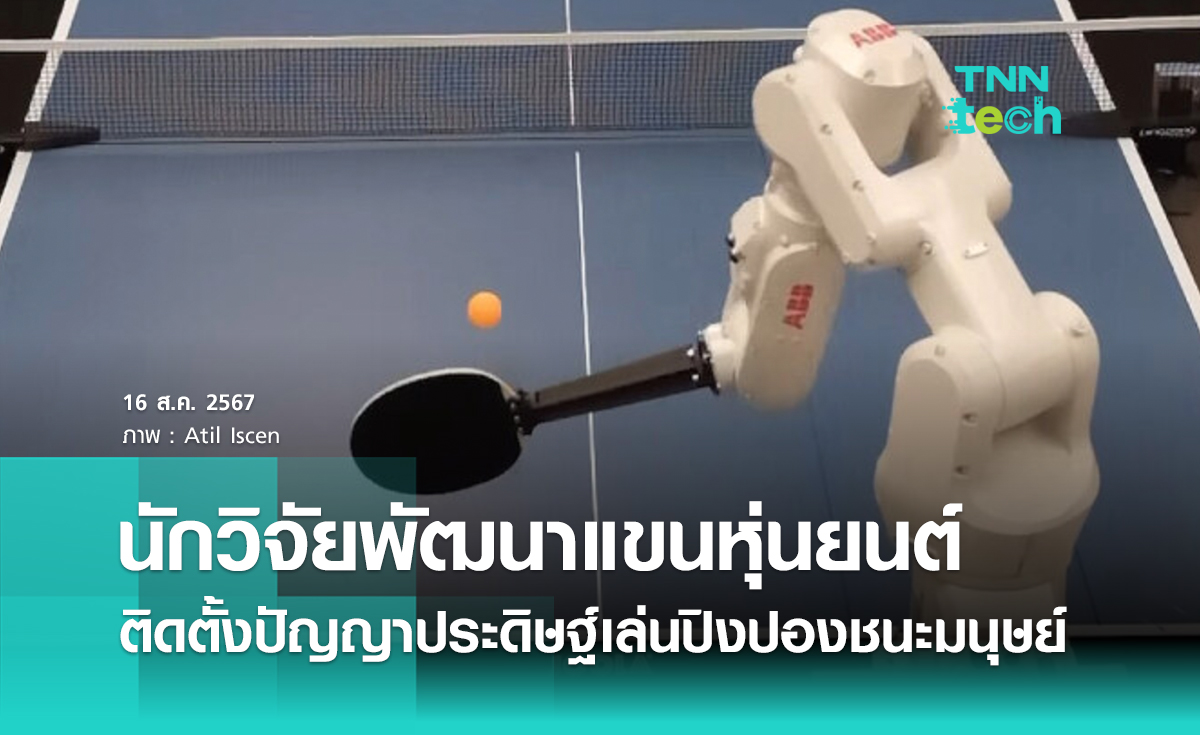
แขนหุ่นยนต์จากบริษัท เอบีบี (ABB) โครงสร้างได้รับการติดตั้งในแนวระนาบ ที่มีลักษณะคล้ายรางจำนวน 2 เส้น ทำให้หุ่นยนต์สามารถเคลื่อนที่ไปด้านข้างซ้ายขวาในลักษณะเดียวกับนักกีฬาปิงปอง โดยข้อต่อของแขนหุ่นยนต์สามารถเคลื่อนที่ได้อย่างคล่องแคล่ว สำหรับไม้ปิงปองได้รับการขึ้นรูปด้วยเครื่องพิมพ์ 3 มิติ พร้อมยางอัดเม็ดชนิดพิเศษ
เนื่องจากแขนหุ่นยนต์ทำงานร่วมกับปัญญาประดิษฐ์ จึงทำให้มันสามารถเรียนรู้และพัฒนาตัวเองจากข้อมูลการเล่นปิงปองได้อย่างรวดเร็ว ทั้งในช่วงการฝึกซ้อม และการแข่งขันจริงกับนักกีฬาปิงปองที่เป็นมนุษย์ โดยมันสามารถคาดการณ์วิธีการเล่นของนักกีฬาปิงปองฝ่ายตรงข้าม หรือการจับทางคู่ต่อสู้ได้อย่างรวดเร็ว
ทั้งนี้ นักวิจัย Google Deepmind ได้แยกการติดตั้งแขนหุ่นยนต์ออกเป็นสองระดับ คือ ระดับต่ำและระดับสูง เพื่อให้แขนหุ่นยนต์เคลื่อนไหวได้ดีที่สุด โดยระบบปัญญาประดิษฐ์ของหุ่นยนต์จะพิจารณาข้อมูลจากรูปแบบการเล่นในการระหว่างการแข่งขัน และออกคำสั่งตอบโต้ด้วยเทคนิคการตีที่ดีที่สุดภายในเสี้ยววินาที คล้ายการตัดสินใจของมนุษย์
ตัวอย่างเทคนิคการตีลูกปิงปองที่แขนหุ่นยนต์สามารถทำได้ เช่น การตีลูกให้หมุนขึ้นด้วยความเร็ว หรือการตีลูกท็อปสปิน การตีลูกหน้ามือ และการตีลูกหลังมือ แขนหุ่นยนต์ได้ศึกษาทักษะเหล่านี้โดยใช้การทดลองและศึกษาข้อผิดพลาด ซึ่งระบบจะเรียนรู้วิธีการกระทำเพื่อให้ได้ผลลัพธ์ที่ดีที่สุดผ่านการแข่งขันปิงปอง นอกจากนี้ทีมนักวิจัยยังฝึกแขนหุ่นยนต์ในสภาพแวดล้อมจำลองหรือการตั้งค่าเกมเสมือนจริง หรือการเรียนรู้แบบเสริมแรง (RL)
การแข่งขันระหว่างแขนหุ่นยนต์ ABB กับนักปิงปองเกิดขึ้นหลังจากหุ่นยนต์ได้รับการฝึกสอนและเรียนรู้ด้วยตัวเองผ่านระบบเสมือนจริง แขนหุ่นยนต์ ABB ต้องทำการแข่งขันกับนักปิงปองจำนวน 29 คน ที่เป็นมนุษย์ ซึ่งมีทักษะที่แตกต่างกัน เริ่มจากระดับเริ่มต้น ระดับกลาง ระดับสูง และระดับสูงขึ้นไป กติกาส่วนใหญ่จะเหมือนกับการเล่นปิงปองทั่วไป ยกเว้นแขนหุ่นยนต์ ABB จะไม่สามารถเสิร์ฟลูกได้
ผลการแข่งขันพบว่าแขนหุ่นยนต์ ABB ชนะการแข่งขันมากถึงร้อยละ 45 และแขนหุ่นยนต์ ABB ชนะการแข่งขันแบบเดี่ยวร้อยละ 46 และเมื่อแข่งกับผู้เล่นมือใหม่ พบว่าแขนหุ่นยนต์ชนะการแข่งขันทุกนัด และเมื่อต้องแข่งกับผู้เล่นระดับกลาง พบว่าแขนหุ่นยนต์ชนะการแข่งขันคิดเป็นร้อยละ 55 แต่อย่างไรก็ตาม แขนหุ่นยนต์ ABB ไม่สามารถเอาชนะนักปิงปองที่มีความสามารถระดับสูงได้ แต่การเอาชนะนักปิงปองที่เป็นมนุษย์ในระดับมือใหม่และระดับกลางได้ ก็นับเป็นก้าวสำคัญในการพัฒนาหุ่นยนต์ ที่แสดงให้เห็นถึงการทำงานร่วมกันระหว่างหุ่นยนต์และปัญญาประดิษฐ์ ซึ่งสามารถเรียนรู้พัฒนาตัวเองและเคลื่อนไหวได้อย่างคล่องแคล่ว
ที่มาของข้อมูล Designboom
ที่มาข้อมูล : -