สรุปข่าว
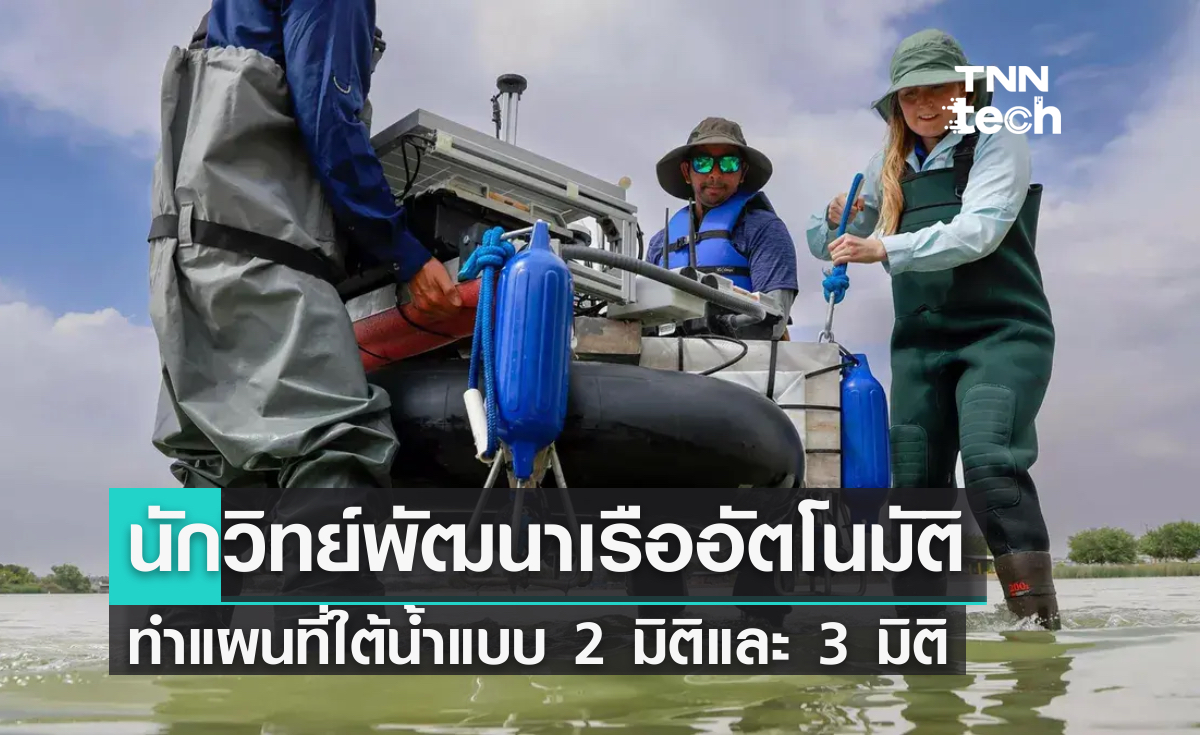
การสำรวจเพื่อทำแผนที่ทางภูมิศาสตร์ใต้น้ำ เป็นหนึ่งในการสำรวจที่ค่อนข้างอันตราย จึงเป็นที่มาของ “เรือสำรวจอัตโนมัติ” พัฒนาโดยทีมนักวิทยาศาสตร์จากมหาวิทยาลัยเท็กซัส (The University of Texas) ประเทศสหรัฐอเมริกา
เรือสำรวจอัตโนมัติ
โดยตัวเรือเป็นเรือไร้หางเสือ มีลักษณะเป็นทุ่นอะลูมิเนียมมัดอยู่ติดกับยางในของรถยนต์ ทำให้มันสามารถลอยน้ำได้ ตัวเรือมีความกว้าง 0.9 เมตร และยาว 0.9 เมตร สามารถหมุนได้ 360 องศา และมีความเร็วที่ 1.5 เมตรต่อวินาที โดยมันอาศัยพลังงานจากแบตเตอรี่ลิเธียมและแผงโซลาร์เซลล์ ทำให้เรือสามารถครอบคลุมพื้นที่ได้เกือบ 43,900 ตารางเมตร และอยู่ในทะเลได้นานถึง 4 ชั่วโมง
สาเหตุที่ทีมนักวิทยาศาสตร์สร้างเรือลำนี้ขึ้นมาก็เพื่อตอบสนองความต้องการของนักวิทยาศาสตร์ในการทำความเข้าใจแหล่งน้ำ เช่น ทะเลสาบ, แม่น้ำ, มหาสมุทรและอ่างเก็บน้ำ ซึ่งแผนที่น้ำจะแสดงข้อมูลเกี่ยวกับปริมาณน้ำในอ่างเก็บน้ำและเศษซากใต้น้ำ ส่งผลให้นักวิทยาศาสตร์สามารถสร้างแบบจำลองทางอุทกวิทยา, พยากรณ์น้ำท่วม, ศึกษาพืชพรรณและระบบนิเวศในน้ำได้
โดยตัวเรือใช้เครื่องหยั่งน้ำเสียงสะท้อนชนิดหลายลำคลื่น (Multibeam EchoSounder) สำหรับการตรวจจับเศษซากใต้น้ำและระดับความลึกของน้ำ ซึ่งมันทำงานโดยการส่งคลื่นเสียงลงไป และรับคลื่นเสียงที่สะท้อนกลับ แล้วนำมาประมวลผล เพื่อทำแผนที่สำรวจใต้น้ำแบบ 2 มิติ และแบบ 3 มิติ
นอกจากนี้ มันยังมาพร้อมกับระบบป้องกันความผิดพลาดที่จะเรียกใช้ฟังก์ชันกลับสู่ฐานในกรณีที่แบตเตอรี่เหลือน้อยหรือมีลมกระโชกแรง ทำให้มั่นใจได้ถึงการทำงานที่ปลอดภัยและเชื่อถือได้
สำหรับการขับเคลื่อน เรืออาศัยตัวขับดันที 200 (T 200) ที่ติดอยู่บริเวณมุมทั้ง 4 ด้าน ของเรือ โดยมันได้รับการติดตั้งซอฟต์แวร์มิชชั่น แพลน (Mission Plan) เพื่อทำหน้าที่เป็นสมองของเรือสำหรับสื่อสารกับเซนเซอร์ชายฝั่ง, ควบคุมความเร็วและทิศทาง ซึ่งมีการใช้งานจีพีเอส (GPS) ร่วมกับเข็มทิศดิจิทัลยูเอสวี (USV)
ส่วนเสาอากาศทั้ง 4 เสา บนเรือจะทำหน้าที่ส่งข้อมูลแบบเรียลไทม์ให้กับอุปกรณ์ควบคุมภาคพื้นดิน ในขณะที่ระบบควบคุมส่วนใหญ่ประกอบด้วยริเวอร์เซอร์เวเยอร์ เอ็ม9 (RiverSurveyor M9) สำหรับสร้างคลื่นเพื่อวัดกระแสน้ำ, ความลึกและการวัดปริมาณน้ำแบบสามมิติ
นอกจากนี้ยังมีการติดตั้งชุดคอมพิวเตอร์บอร์ดราสเบอร์รี่พาย (Raspberry Pi) สำหรับตรวจสอบสัญญาณวิกฤต, ควบคุมระบบไฟฟ้าและควบคุมระบบป้องกันข้อผิดพลาด

การทดสอบในทะเลสาบจริง
โดยทีมนักวิทยาศาสตร์เคยทดลองใช้งานเรือลำนี้ในทะเลสาบแอสคาเรต รัฐเท็กซัส และทะเลสาบไกรด์สโตน รัฐนิวเม็กซิโก ประเทศสหรัฐอเมริกา ซึ่งพวกเขาพบว่าเรือสามารถทำงานได้ตามเป้าหมาย เพื่อนำข้อมูลมาสร้างแผนที่สำรวจใต้น้ำแบบ 2 มิติ และแบบ 3 มิติ
"เป้าหมายของฉันคือการทำให้เรือมีความทันสมัย และฉันคิดว่าฉันทำได้ แน่นอนว่ายังมีสิ่งที่ต้องปรับปรุงอยู่เสมอ แต่ระบบใช้งานได้ดี และสำหรับตอนนี้ ฉันหวังว่ามันจะทำให้นักวิทยาศาสตร์ทำงานง่ายขึ้น” - ดร. ลอรา อัลวาเรซ (Laura Alvarez) หนึ่งในทีมนักวิทยาศาสตร์กล่าว
ในอนาคต ทีมนักวิทยาศาสตร์ตั้งเป้าที่จะใช้เรือลำนี้เพื่อศึกษาการไหลและความลึกของแม่น้ำรีโอแกรนด์ ในประเทศเม็กซิโกต่อไป
ข้อมูลจาก interestengineering.com
ภาพจาก UTEP
ที่มาข้อมูล : -